



サイバードライブゾイド製作記
サイバードライブゾイド本体の改良と、
GBAではなく,パソコンからの操作を目標にしています。
ゾイドの主な改良点は腰の可動部、赤外線通信をBluetoothにしました。
またカメラを搭載し、カメラから送られてくる動画をリアルタイムで表示できるようにしました。
サイバードライブゾイドについては、ゾイド格納庫さんのページで詳しく説明されていますー
動作・構造確認
・まずは動作や構造を解析しました!
CDZ本体を分解
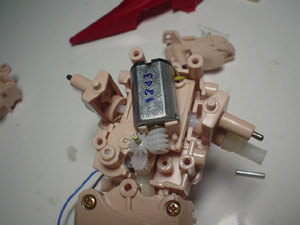

■上半身 上:モーター
回転方向を変えることで、BFモーターボックスのようにギア位置を変更して銃の動作と、腰・首の動作を使い分けています。
■上半身 下:腰・首の可動部分
クランクの回転を利用して、それれぞれ動かしています。
その他にも前足の角度を変更しています。
しかし、このままでは腰を動かすだけで、位置の固定ができませんね。

■下半身:モーター
歩行用のモーターです。
下半身と上半身それぞれの足を動かします。
■上半身と下半身の接続部
下半身モーターで生み出した動力を前足に伝えるためのシャフトです。

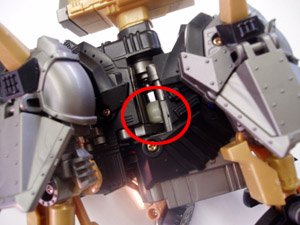
■後ろ足:ウィークポイント
対戦時に使用されるスイッチ。
対戦中は相手にこのスイッチを押されると
ゾイドがフリーズ状態になります。
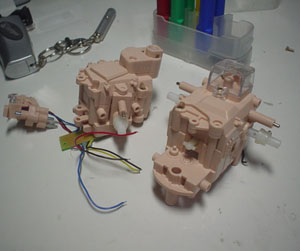
■上半身ユニットと下半身ユニット
手前が下半身
画面奥が上半身と頭部です。
頭部には2色LEDを使用しています。

■ゾイド側:赤外線アダプター
赤外線の受光機は2機。
赤外線通信は障害物に影響されやすいので
リモコンやGBAと通信していると、
通信が途切れることがありました。
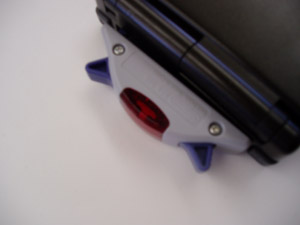
■GBA側:赤外線アダプター
市販されているGBA用の赤外線アダプターです。
SDZに付属しているリモコンも赤外線で通信します。
動作を確認して
■動作を確認して
今回の動作確認で問題点を見つけました。
1.腰の動作
腰を左右に動かすことで旋回しているのですが、
今のままでは説明書にあるように腰を動かすだけで、位置の固定ができません
コストの問題があるためと思われるので仕方が無いのでしょうか。
今回はコストの問題を考えないので、サーボモーターを搭載しました。
2.通信方法
赤外線通信は障害物の有無・角度に影響されやすいので、
Bluetoothを使用しました。
3.バッテリー
バッテリーとして単4電池を2本使用しています。
腹部に抱えてるので、プロポーションがあまりよろしくありません
また今回使用するカメラは9V〜12Vの電圧が必要なので、
このままでは電圧不足でした。
そこで最大12Vのリチウムポリマーバッテリーを使用することにしました。
ハードウェアの作成
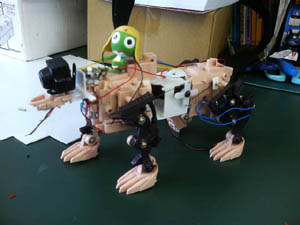

■カメラとサーボを搭載した状態
背中にカエルが乗っていますが、頭部に小型カメラ
腰関節をプラ材からスクラッチし、そこにサーボを搭載しました。
また首の位置を検出するためのロータリーセンサーを首の根元に追加しています。
■腰:超小型サーボモーター
サーボモーターはパルス幅によって、シャフト位置を自由に指定できるモーターです。
今回はピアノ線と組み合わせて、上半身と下半身を動かせるようにしました。
■頭部:チップLED
動作を確認している際に2色LEDを壊してしまったので、チップLEDの赤と緑、それぞれを2つづつ頭部に搭載しました。

■頭部:小型CCDカメラ
9V〜12Vの電源を供給するだけで、動作するカメラ
ゾイド本体とは独立して動作するので、制御の必要が無く、動画を簡単に受信できます。
画質、電波状態に影響されるなどの問題がありますが・・
パソコンにビデオキャプチャを接続することで、
動画を表示するようにしました。
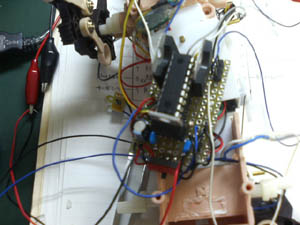
■腹部:マイコンモジュール
Bluetooth,サーボモーターの追加や、制御プログラムを作成するためには
CDZに元から付いていたマイコンは使用できないので、PICなどでマイコンモジュールを作成しました。
今回作成したモジュールはPIC・モータードライバ・レギュレーターなどで構成されています。
PICはアナログ入力、パルス出力、Bluetoothのシリアル通信に対応した「PIC16F88」を使用しました。

■仮組み
一通り完成したところで、部品を組み立ててみました。
しかし、この状態でも腹部のマイコンモジュールが大きくお腹がでていました・・。
そこで、マイコンモジュールを取り外し可能なユニットにして,尻尾に取り付けることにしました。
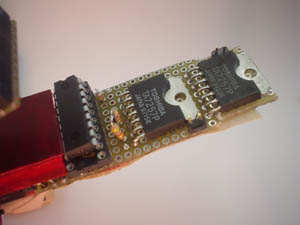
■尻尾:マイコンモジュール 1
尻尾に外付け可能にしたマイコンモジュールです。
先ほどよりも,空間の余裕ができて、
回路,部品配置も分かりやすくなっています。
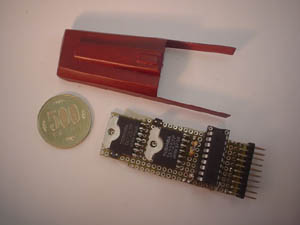
■マイコンモジュール 2
マイコンが向き出しだったので、
プラ材からカバーを作成しました。
裏面には部品・配線の破損、
ショートを防ぐためにガムテープを貼ってあります。
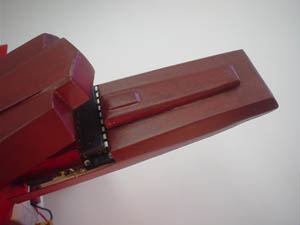
■尻尾:マイコンモジュール 3
カバーをつけたところです。
カバーは取り外しが可能ですが、
PICを取り外ししやすいように
PICはむき出しになっています。
万が一にも破損した場合はカバーを取り付ける予定です。
PICは原価も安い上にストックもありますが・・
■マイコン制御の流れ
Bluetoothから受信したデータを元に各種モーター、LEDを制御します。
またゾイド本体に搭載された。
各種センサーからの入力があった場合にはそれに従った処理を行い、Bluetoothを使用してパソコンに送信します。


■背中:Bluetooth 1
BluetoothはSPPと言う、シリアルポートをエミュレーションする通信を行います。
また赤外線とは違って障害物の影響を受けにくいので、
信頼性が高いのが特徴です。
今回はBluetoothモジュールを従来の
赤外線モジュールが付いていた部分に取り付けました。
モジュールはマイコン同様に取り外しが可能
さらにカバーを作成しました。
■Bluetooth 2
作成したBluetoothモジュールとカバー


■パソコン:Bluetooth 3
パソコンとゾイド間で通信を行うために
パソコンにもBluetoothをつけました。
使用したのはPCI社製USB Bluetoothアダプター、
ゾイドとリンクすると青いランプが点等します。
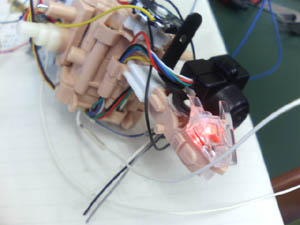
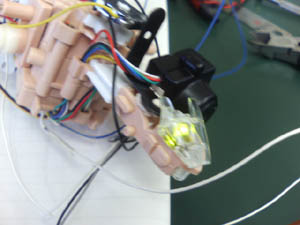
■背中:Bluetooth 4
Bluetoothモジュールをゾイドに取り付けたところです。
こちらはBT社製「ZEAL」を使用しました。
パソコンとリンクすると赤いLEDが点等します。


■背中:電源
リチウムポリマーバッテリーを使用しました。
電圧が下がりすぎると破損してしまうので、
マイコン側で電圧を監視するようにしています。
■腹部:各種レギュレーター
電源の最大電圧は12V
カメラはこれで良いのですが、
マイコンは5V,Bluetoothは3Vの電源が必要です。
そこで各種レギュレーターを使用して
最適な電源を取り出しました。

装甲をスクラッチして,ハードウェアが完成しました。
主な動作は
・前進
・後退
・胴体を右に曲げる
・胴体を左に曲げる
・胴体を中央に戻す。
・背中の武器の発射
を行います。
腰のサーボモーターと連動して、首も動作するようにしました。
また各種LEDでゾイド本体の状態がわかるようにしてあります。
問題としていた,腰の動作,通信,プロポーションはまぁ満足できるレベルになっています。
ソフトウェアの作成
■ソフトウェア:パソコン側
ゾイドの遠隔操作や、ゾイド視点からの画像入力を行うアプリケーションソフトを作成しました。
開発ツールはVisual C#です。
まずはカメラからの動画を表示できるように,DirectShowを使用するしました。
しかし,資料が非常に少なかったので、wedサイトを参考にして作成しました。
こちらのサイトさんが特に役立ちましたので紹介を
http://www.geekpage.jp/programming/directshow/
http://www1.bbiq.jp/kougaku/link_videocap.html
今回はこちらのサンプルプログラムをDL,設定して使用することにしました。
http://mobiquitous.com/programming/usbcamera.html
次に通信するために,MScommを追加してシリアル通信に対応させました。
こちらもサイトを参考にして作成
参考にした主なサイトはこちらですー
http://www.picfun.com/serial00.html

完成したソフトウェア
動画をリアルタイムで表示するとともに、下のボタンを押すことでゾイドを遠隔操作することが可能です。
(画像ははめ込み合成です)
また、このままでは操作性に問題があると判断し,ゾイドをジョイパットからも操作できるようにしました。
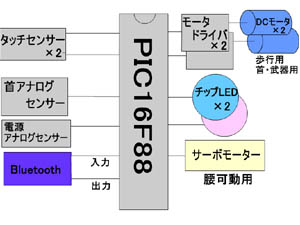
■ソフトウェア:ゾイド側
PIC16F88にプログラミングを行いました。
ゾイドが起動すると各種初期化を行い,コマンドを受信すると,あらかじめ定義した動作を行います。
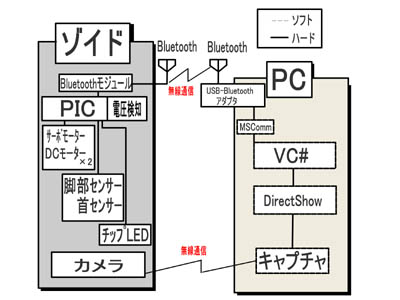
今回のシステムを簡略した図式化すると以下のようになります。
反省
■ハードウェア
歩行の調整がまだ上手く行かず,障害物や斜面があると歩行が不能になってしまうことがありました。
原因は腰を延長したために足のバランスが崩れた為だと考えられます。
対策として足の裏にプラ材を追加して,歩行を安定させる事ができました。
■カメラ
電波の状態によって画面の乱れが見受けられました。
ゾイドを動かしているうちに電波の状態が変化するためだと考えられます。

ポスター的な
■歩行時の動画(cdz.3gp 328KB)